Dil Değiştir :
igus Robot Kontrol yazılımı
Robotları lisanssız programlama, simüle etme ve kontrol etme
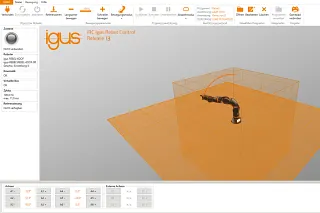
igus Robot Kontrol yazılımı, basit ve sezgisel robot programlama ve kontrol sistemleri sağlayarak otomasyona başlamayı kolaylaştırır. Modüler yapısı sayesinde delta robotlar, lineer robotlar ve çok eksenli mafsallı robotlar gibi çeşitli robot kinematikleri kontrol edilebilir. Yazılım, robotun bireysel hareketlerini 3D yüzey üzerinde simüle etmek için kullanılabilir - bu adım için robotun bağlı olması gerekmez.
Bu sayfada bulacaklarınız
Ücretsiz robot yazılımı
Robot yazılımı ile çeşitli uygulamaların programlama örnekleri
- Robot ve kontrol sistemi arasında basit bağlantı
- 3D arayüz ve dijital ikiz ile sezgisel kullanım, hareket dizilerinin doğrudan yürütülmesini ve kontrol edilmesini sağlar
- Kamera arayüzü yapılandırması doğrudan kontrol sistemi ve yazılım aracılığıyla mümkündür
- Delta, lineer, SCARA ve mafsallı kol robotlarının programlanması
- Yazılım, satın almadan önce bile risksiz test imkanı sağlar
Sistem gereksinimleri:
- Windows 10 işletim sistemine sahip bilgisayar
- Ethernet veya WLAN üzerinden iletişim
- 500MB boş disk alanı
Örnek programlar, wiki ve eğitim kursları



Arayüzler
PLC arayüzleri
PLC arayüzü (PLC = Programlanabilir Mantık Denetleyicisi), dijital giriş ve çıkışlar aracılığıyla temel işlevlerin yürütülmesini ve durumların sinyalizasyonunu sağlar. PLC ile kontrole ek olarak, bu arayüz donanım düğmeleri ile de çalışmaya olanak sağlar.
Dijital girişler ve çıkışlar
Robot programları yüklenebilir ve başlatılabilir ve tutucu komutları dijital girişler veya global sinyaller aracılığıyla gönderilebilir. Bu, örneğin düğmeler veya CRI-GSig komutu kullanılarak belirli bir seçimden bir program seçilecekse kullanışlıdır.
Modbus TCP/IP
Modbus TCP arayüzü, örneğin PLC verilerini ve talimatlarını robot kontrol sistemine göndermek ve durum bilgilerini almak için kullanılabilir.
CRI arayüzü
CRI arayüzü, karmaşık talimatların gönderilmesini ve TCP/IP kullanılarak Ethernet arayüzü üzerinden bilgi ve ayarların alınmasını sağlar. igus Robot Kontrol, entegre bir kontrol sistemine sahip robotlara veya kontrol sisteminin diğer örneklerine bağlanmak için bu arayüzü kullanır.
Kamera arayüzü
Kamera arayüzü, nesne algılama ve video kameralarının kullanılmasını sağlar. Nesne algılama kameraları nesnelerin konumunu ve sınıfını algılar ve bunları isteğe bağlı olarak bir video görüntüsüyle birlikte kontrol sistemine iletir. Kontrol sistemi, kameranın nesne konumlarından robot koordinat sistemindeki konumları hesaplar. Saf video kameralar yalnızca görüntü verir ve bu nedenle yalnızca çalışma alanını izlemek için kullanılabilir, nesneleri tespit etmek için kullanılamaz.
Bulut
Bulut arayüzü, robotun RobotDimension aracılığıyla izlenmesini sağlar. Etkinleştirildikten ve oturum açıldıktan sonra robot, temel durum bilgilerini ve kamera görüntülerini çevrimiçi hizmete gönderir. Kullanıcı robotlarını web sitesinde listeleyebilir ve bilgileri alabilir.
ROS, Matlab, LabView ve çok daha fazlası.
Robotları ROS ortamınıza entegre edin. Donanım iletişimi, Teleop ve moveI için dokümantasyon ve paketler
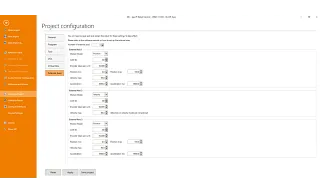
Proje konfigürasyonları
Tutucu
Monte edilen alet burada belirtilebilir. Aracın değiştirilmesi projenin yeniden yüklenmesini veya entegre kontrol sisteminin yeniden başlatılmasını gerektirir. Yeni araçlar "Data/Tools dizininde bir yapılandırma dosyası olarak tanımlanabilir."
Sanal kutu
Robot kolunun hareket aralığı, sanal kutunun ayarları ile sınırlandırılmıştır. Bu işlevsellik, uygulamaya bağlı olarak mekanik hasarı önlemeye yardımcı olur ve programlamayı basitleştirir. Sanal kutuyu ihlal eden bir program yürütülürse, bir hata mesajıyla durdurulur.
Dış eksen
Robot kontrol sistemi 3 adede kadar ek ekseni destekler (iRC'de "harici eksen" olarak da adlandırılır). Bunlar robot eksenlerine göre kurulabilir ve iRC'nin yapılandırma alanı üzerinden yapılandırılabilir.

Program
Burada robot ve mantık programını, hareket hızını (maksimum hızın yüzdesi olarak), oynatma modunu ve program hatalarına verilen tepkiyi tanımlayabilirsiniz.
Özel kinematik
Robot kontrol sistemi, dijital bir ikiz ile robotunuz için özelleştirilebilir. Ters kinematiği proje işinize uyacak şekilde yapılandırıyoruz.
Programlama
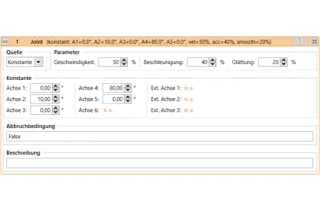
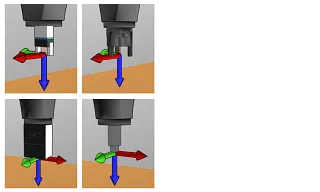
Eksen hareketleri
Joint komutu robotu eksen koordinatlarında belirtilen mutlak bir hedef konuma taşır (örn. eksen açısı veya doğrusal eksen konumu). TCP'nin ortaya çıkan hareketi genellikle düz bir çizgi değil bir eğridir.
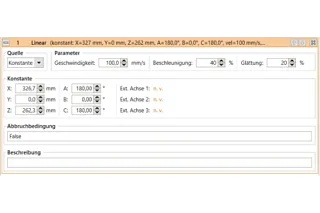
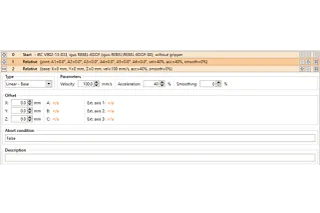
Doğrusal hareket
Linear (Doğrusal) komutu robotu Kartezyen koordinatlarda belirtilen mutlak bir hedef konuma taşır. TCP'nin ortaya çıkan hareketi düz bir çizgi izler.
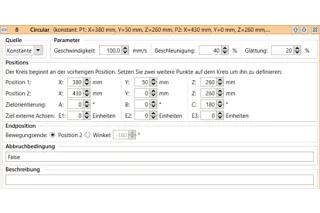
Dairesel hareketler
"Dairesel hareket" talimatı, tam veya kısmi dairesel bir yol boyunca hareketleri mümkün kılar. Doğrusal hareketlerle uyumludur, böylece doğrusal hareketlerden ve doğrusal hareketlere geçiş yumuşatılabilir.
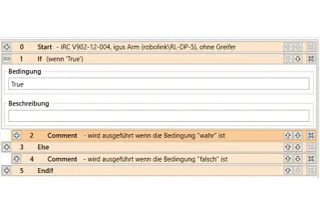
Koşullar
Koşullar if-then-else komutlarında, döngülerde ve hareket komutlarında iptal koşulları olarak kullanılabilir. Koşullar dijital girişlerin, global sinyallerin, Boole işlemlerinin ve karşılaştırmaların kombinasyonları olabilir.
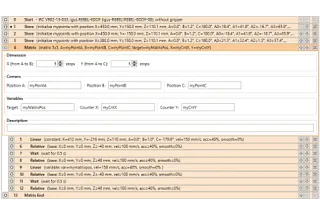
Matris hesaplama
Izgara talimatları, örneğin paletleme görevleri için tutma veya bırakma konumu olarak bir ızgaraya hizalanmış konumları hesaplar.
Göreceli
Göreceli komutu, robotu mevcut konumuna göre hareket ettirmenizi sağlar. Bu komuta "Eylem" → "Göreceli hareket" altındaki menü öğeleri aracılığıyla erişilebilir.

Alt Programlar
Alt programlar alt-komut ile çağrılabilir. Alt program dosyasının yolu "Dosya adı" altında belirtilir. Bu, iRC klasörünün "Programlar" alt klasörüne göredir "Veri".
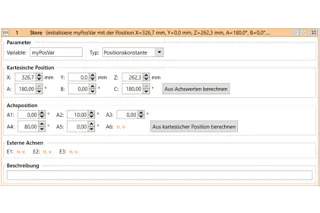
Değişkenler ve değişken erişimi
igus Robot Control ve TinyCtrl için programda iki tür değişken desteklenir:
- Sayı değişkenleri: Bunlar tamsayı veya kayan nokta sayılarını saklamak için kullanılabilir.
- Konum değişkenleri: Bunlar Kartezyen pozisyonları ve eklem pozisyonlarını saklamak için kullanılabilir. Böyle bir değişkenin Kartezyen pozisyon veya eklem pozisyonu olarak yorumlanıp yorumlanmayacağı bağlama bağlıdır.
Robot yazılımını indirin

- Lisans gerektirmeyen igus Robot Kontrol yazılımı, kontrol sistemine entegre edilmiştir ve bu nedenle bir sistemin birçok bileşeni için standartlaştırılmış bir işletim konsepti ve tutarlı iletişim hizmetleri kullanır. Bu, daha az proje planlama çalışması ve daha hızlı devreye alma anlamına gelir.
- Tüm igus kinematiklerini yazılımda önceden test edin
- Tüm igus robotları, tek eksenler ve AGV'ler için önceden programlanmış projeler ile
- Robot simülasyonu ile sezgisel 3D arayüz