Dil Değiştir :
Cerrahide yardımcı robotlar için hassas, boşluksuz kaymalı ve lineer rulmanlar
drylin kayma çubukları kesinlikle boşluksuz rulmanlar sağlar
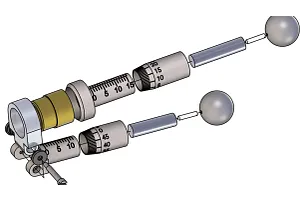
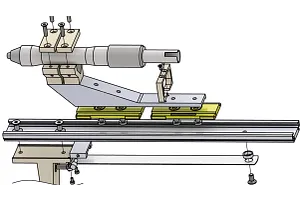
Leibniz Universität Hannover Mekatronik Sistemler Enstitüsü'nde geliştirilen bu sistem, sensörinöral sağırlık ve ileri derecede işitme kaybının tedavisi için minimal invaziv koklear implant cerrahisinde doktorları destekliyor. Bu teknik, kafatasının 35 mm kadar altına ve koruma gerektiren anatomik yapıların hemen yakınına yerleştirilebilen bir delik açılmasını gerektiriyor. Bu nedenle sistem çok hassas çalışmalı ve buhar sterilizasyonu gibi tıbbi hijyen gereksinimlerini de karşılamalıdır. Cerrahi alet kılavuzu artık iki taşıyıcıya sahip bir drylin N kayma çubuğu içeriyor. Buna ek olarak, yağlama gerektirmediği için tıbbi uygulamalarda kullanım için ideal olan birkaç iglidur X kaymalı yatak kullanılmaktadır.